Contoh PLC Operasi proses pengisian dan pengosongan Tangki
Pengisian dan pengosongan reservoir adalah proses umum dalam industri serta kebutuhan untuk mencampur dua atau lebih zat. Dengan menggunakan katup otomatis proses ini dapat benar-benar otomatis. yang akan kita gunakan misalkan adalah air, dan tangki harus diisi dan dikosongkan empat kali.
Ketika Anda menekan tombol T1 pada panel operasi, katup V1 terbuka dan sebuah tangki mulai terisi dengan air. Pada saat yang sama, motor M dari mixer mulai bekerja. Ketika reservoir mengisi, permukaan air naik dan mencapai tingkat yang ditetapkan oleh S1 sensor. Menutup katup V1 dan motor mixer berhenti. selanjutnya Katup V2 terbuka, dan tangki tersebut mulai proses pengosongan. Ketika level air turun di bawah tingkat yang ditetapkan oleh sensor S2,maka katup V2 tertutup. Dengan mengulangi siklus yang sama empat kali, lampu yang menunjukkan akhir siklus diaktifkan. Menekan tombol T1 akan memulai siklus baru.
Ketika Anda menekan tombol T1 pada panel operasi, katup V1 terbuka dan sebuah tangki mulai terisi dengan air. Pada saat yang sama, motor M dari mixer mulai bekerja. Ketika reservoir mengisi, permukaan air naik dan mencapai tingkat yang ditetapkan oleh S1 sensor. Menutup katup V1 dan motor mixer berhenti. selanjutnya Katup V2 terbuka, dan tangki tersebut mulai proses pengosongan. Ketika level air turun di bawah tingkat yang ditetapkan oleh sensor S2,maka katup V2 tertutup. Dengan mengulangi siklus yang sama empat kali, lampu yang menunjukkan akhir siklus diaktifkan. Menekan tombol T1 akan memulai siklus baru.




Pembatas Kapasitas Parkir Kendaraan dengan PLC
Contoh Aplikasi PLC 1
Pada kesempatan kali ini yang akan saya bahas adalah contoh sistem aplikasi sederhana menggunakan PLC, yang dapat membatasi kapasitas kendaran dengan maksimum 100, setiap kali mobil masuk secara otomatis PLC akan menambahkan ke jumlah total kendaraan, setiap kali mobil keluar maka PLC akan mengurangi nilai total kendaraan secara otomatis. Ketika jumlah kendaraan mencapai nilai 100 maka sinyal indikator tempat parkir akan menyala yang menandakan kapasitas penuh, dan memberi tahu pengemudi lain untuk tidak masuk karena sudah tidak ada tempat lagi.
Gambar Aplikasi

Cara kerja:
Sensor S1 pada pintu masuk garasi parkir di set pada IR200.00, bit ini untuk mengeksekusi dua instruksi dalam program, yang pertama mereset Carry bit CY (Ini diperlukan sebelum perhitungan lain dilakukan), instruksi kedua untuk menambahkan satu jumlah mobil pada HR00 dan menjumlahkannya lalu hasilnya disimpan dalam HR00. Ruang memory HR (Holding Relay) dipilih untuk menyimpan jumlah kendaran karena ketika supply padam memori didalam HR tidak akan hilang.
Simbol "#" di samping dan instruksi pengurangan mendefinisikan konstanta desimal yang sedang ditambahkan atau dikurangkan dari sejumlah mobil yang sudah ada di garasi. Kondisi untuk melaksanakan instruksi perbandingan BPT selalu dieksekusi karena bitSR253.13 selalu diset, perbandingan akan dilakukan dalam setiap siklus terlepas apakah mobil telah memasuki atau meninggalkan garasi.
Sinyal lampu untuk "garasi penuh" terhubung ke output IR010.00.Kerja lampu dikendalikan oleh EQ (equal) flag di alamat SR255.06 dan GR (greater than) flag di alamat SR255.05. Kedua bit di ORkan (OR logika) dengan output IR010.00 lampu sinyal. Lampu menyala ketika sejumlah mobila lebih besar dari atau sama dengan 100.

Untuk pengembangan bisa saja indikator lampu di hubungkan dengan motor portal pintu masuk, sehingga ketika lokasi parkir penuh pintu akan tertutup dibarengi dengan indikator menyala.
Pengatur Kecepatan Motor
AC/DC Speed Control
Rangkaian untuk mengatur kecepatan putar motor DC, menggunakan potensio untuk menrubah kecepatan.

Rangkaian untuk mengatur kecepatan putar motor DC, menggunakan potensio untuk menrubah kecepatan.

Pendeteksi Infra Merah
Infra Red Detector
Alat untuk mendeteksi sinar infra merah yang dipancarkan transmitter infra merah, fungsi alat ini untuk menguji peralatan yang memancarkan sinar infra merah sebagai media komunikasi, seperti remote tv, remote ac, atau bisa juga untuk menguji sensor robot line follower yang biasanya menggunakan sensor infra merah untuk pendeteksi jalur, (cara kerja alat sederhana Led pada alat akan menyala ketika ada sinar infra merah)

Percobaan 1 AT89C1 Menggunakan Top View Simulator
Bagian 1
Menggerakkan LED
Rangkaian mikrokontroler dengan output led yang akan di simulasikan:

Program sederhana yang akan saya ujicobakan adalah menggerakkan led dari kiri ke kanan dengan cara direct addressing ke port 0, karena output led pada rangkaian berada pada port 0, berikut program yang akan di uji cobakan:
Menggerakkan LED
Rangkaian mikrokontroler dengan output led yang akan di simulasikan:

Program sederhana yang akan saya ujicobakan adalah menggerakkan led dari kiri ke kanan dengan cara direct addressing ke port 0, karena output led pada rangkaian berada pada port 0, berikut program yang akan di uji cobakan:
$mod51
org 0h
start:
mov p0,#11111110b
call delay
mov p0,#11111101b
call delay
mov p0,#11111011b
call delay
mov p0,#11101111b
call delay
mov p0,#11011111b
call delay
mov p0,#10111111b
call delay
mov p0,#01111111b
call delay
sjmp tombol2
sjmp start
org 0h
start:
mov p0,#11111110b
call delay
mov p0,#11111101b
call delay
mov p0,#11111011b
call delay
mov p0,#11101111b
call delay
mov p0,#11011111b
call delay
mov p0,#10111111b
call delay
mov p0,#01111111b
call delay
sjmp tombol2
sjmp start
;------------------------------------
; sub rutin waktu tunda
;------------------------------------
delay:
mov r3,#0255
delay1:
mov r4,#0255
djnz r4,$
djnz r3,delay1
ret
end
delay:
mov r3,#0255
delay1:
mov r4,#0255
djnz r4,$
djnz r3,delay1
ret
end
Berikut saya coba tunjukkan langkah-langkahnya
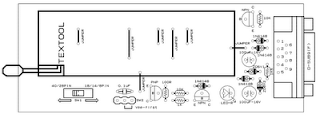
Rangkaian Downloader PIC (PIC Multi Programmer)
Ini adalah perangkat andalan saya ketika bereksperimen dengan mikrokontroler PIC, karena dengan satu perangkat ini kita sudah dapat memprogram berbagai macam mikrokontroler PIC yang termasuk keluarga PIC10F, PIC12C, PIC12F, PIC16F. selain itu perangkat downloader ini dapat dibuat dengan mudah karena menggunakan PCB single layer.
Hardware




Hardware

Skema rangkaian (klik pada gambar untuk lebih jelas)

PCB tampak atas (lebih detail download disini)

PCB tampak bawah (jalur PCB) lebih detail download disini

Penampakan
Software
Untuk software bisa langsung di download disini
Jenis Mikrokontroler yang di program dengan alat ini:
· PIC12C508,PIC12C509
· PIC12C508A,PIC12C509A
· PIC12CE518,PIC12CE519
· PIC12C671,PIC12C672,PIC12CE673,PIC12CE674
· PIC12F629,PIC12F635(1)(2),PIC12F675,PIC12F683(2)
· PIC16C505
· ,16C62B(3),
· PIC16F627,PIC16F628
· PIC16F627A(2),PIC16F628A,PIC16F648A
· PIC16F630,PIC16F636(2),PIC16F676,PIC16F684(2),PIC16F688(2)
· ,PIC16C711(3), PIC16C716(3)
· PIC16C745(3),PIC16C765(3)
· ,PIC16C771(7)
· PIC16C773,PIC16C774
· PIC16C781(7),
· PIC16F818,PIC16F819
· PIC16F84
· PIC16F84A
· PIC16F87(2),PIC16F88
· PIC16F870(8),PIC16F871(8),PIC16F872,PIC16F873,PIC16F874(4),PIC16F876(5),PIC16F877(5)
· PIC16F873A(5),PIC16F874A(5),PIC16F876A,PIC16F877A
· PIC18F1320,PIC18F2320,PIC18F4320
· PIC18F242,PIC18F252,PIC18F442,PIC18F452
· PIC18F248,PIC18F258,PIC18F448,PIC18F458(3)
· PIC18F4539(3)
Sumber : http://feng3.cool.ne.jp/en/pg5v2.html
Down Counter 3 Digit
Skema rangkaian Down Counter 4 Digit (Counter digital hitung mundur 999 - 0)


Klik pada gambar untuk lebih jelas
Up Counter 4 Digit
Skema rangkaian Up Cunter 4 Digit (Counter digital hitung maju 0 - 9999)


Klik pada gambar untuk lebih jelas
0 - 30V DC Variabel Power Supply
Skema rangkaian Variabel Power Supply 0 - 30VDC, sangat cocok untuk yang suka bereksperimen, karena mudah dibuat dengan biaya rendah. arus maksimumnya adalah 1,5A.


Untuk lebih jelas klik pada gambar.
Penjelasan Port Pada Mikrokontroler PIC16F84
Istilah "port" mengacu kepada sekelompok pin pada mikrokontroler yang dapat diakses secara bersamaan, atau di mana kita bisa mengatur kombinasi yang diinginkan dari nol dan satu, atau membaca status yang ada. Secara fisik, port adalah register di dalam mikrokontroler yang dihubungkan dengan kabel ke pin mikrokontroler. Port merupakan koneksi fisik dari Central Processing Unit dengan dunia luar (Perangkat Luar). Mikrokontroler menggunakan Port untuk memantau atau mengontrol komponen atau perangkat lain. Karena fungsi, beberapa pin memiliki peran ganda seperti PA4/TOCKI misalnya, yang dalam waktu bersamaan bit keempat Port A dan input eksternal untuk Free-Run Counter. Seleksi salah satu dari dua fungsi pin dilakukan di salah satu register konfigurasi. Sebuah ilustrasi ini adalah T0CS bit kelima dalam register OPTION. Dengan memilih salah satu fungsi yang lainnya dinonaktifkan.
Semua port pin dapat ditunjuk sebagai input atau output , sesuai dengan kebutuhan perangkat yang sedang dikembangkan. Dalam rangka untuk mendefinisikan pin sebagai pin input atau output, kombinasi yang tepat dari nol dan satu harus ditulis dalam register TRIS. Jika bit yang sesuai dari register TRIS berisi logika "1", maka pin adalah pin masukan, dan jika sebaliknya ini merupakan pin output. Setiap port memiliki register TRIS. Dengan demikian, port A memiliki TRISA, dan port B TRISB. PortA dan PORTB terletak pada register memori bank 0, sedangkan TRISA dan TRISB pin register berlokasi di bank 1.
PORTB dan TRISB
PORTB berisi 8 pin. Register yang tepat untuk mengatur arah data adalah TRISB. Mengatur bit register TRISB mendefinisikan pin port sebagai input, dan mereset bit di register TRISB berarti mendefinisikan pin port yang sesuai sebagai output.

Setiap pin PORTB memiliki internal pull-up resistor yang lemah (resistor yang mendefinisikan baris ke logika satu) yang dapat diaktifkan dengan mengatur ulang RBPU bit ketujuh dalam register OPTION. 'pull-up' ini resistor otomatis akan dimatikan bila pin port dikonfigurasi sebagai output. Bila mikrokontroler diaktifkan, pull-up dinonaktifkan.
Empat pin PORTB, RB7: RB4 dapat menyebabkan interupsi yang terjadi ketika status mereka berubah dari logika satu ke logika nol dan berlawanan. Hanya pin dikonfigurasi sebagai input dapat menyebabkan interupsi ini terjadi (jika ada RB7:. pin RB4 dikonfigurasi sebagai output, interrupt tidak akan dihasilkan pada perubahan status) opsi interupsi ini bersama dengan internal pull-up resistor membuatnya lebih mudah untuk memecahkan masalah-masalah umum kita temukan dalam praktek misalnya keyboard matriks.
Contoh di atas menunjukkan bagaimana pin 0, 1, 2, dan 3 di set sebagai input, dan pin 4, 5, 6, dan 7 untuk output, setelah pin output PORTB diatur ke satu.
PORTA dan TRISA
PORTA memiliki 5 pin yang berdampingan. Register yang sesuai untuk arah data TRISA pada alamat 85h. Seperti dengan PORTB, Mengset bit (1) di register TRISA juga mendefinisikan pin port yang sesuai sebagai input, dan mereset bit (0) di register TRISA mendefinisikan pin port yang sesuai sebagai output.
Penting untuk dicatat bahwa PORTA pin RA4 hanya dapat menjadi input. Pada pin ini juga terletak input eksternal untuk timer TMR0.
Contoh menunjukkan bagaimana pin 0, 1, 2, 3, dan 4 ditujukan sebagai input, dan pin 5, 6, dan 7 sebagai output.

Empat pin PORTB, RB7: RB4 dapat menyebabkan interupsi yang terjadi ketika status mereka berubah dari logika satu ke logika nol dan berlawanan. Hanya pin dikonfigurasi sebagai input dapat menyebabkan interupsi ini terjadi (jika ada RB7:. pin RB4 dikonfigurasi sebagai output, interrupt tidak akan dihasilkan pada perubahan status) opsi interupsi ini bersama dengan internal pull-up resistor membuatnya lebih mudah untuk memecahkan masalah-masalah umum kita temukan dalam praktek misalnya keyboard matriks.
| bsf | STATUS, RP0 | ;Bank1 |
| movlw | 0x0F | ;Mengatur pin input dan output |
| movwf | TRISB | ;Menulis ke register TRISB |
| bcf | STATUS, RP0 | ;Bank0 |
| bsf | PORTB, 4 | ;PORTB <7:4>=0 |
| bsf | PORTB, 5 | |
| bsf | PORTB, 6 | |
| bsf | PORTB, 7 |
Contoh di atas menunjukkan bagaimana pin 0, 1, 2, dan 3 di set sebagai input, dan pin 4, 5, 6, dan 7 untuk output, setelah pin output PORTB diatur ke satu.
PORTA dan TRISA
PORTA memiliki 5 pin yang berdampingan. Register yang sesuai untuk arah data TRISA pada alamat 85h. Seperti dengan PORTB, Mengset bit (1) di register TRISA juga mendefinisikan pin port yang sesuai sebagai input, dan mereset bit (0) di register TRISA mendefinisikan pin port yang sesuai sebagai output.
Penting untuk dicatat bahwa PORTA pin RA4 hanya dapat menjadi input. Pada pin ini juga terletak input eksternal untuk timer TMR0.
| bsf | STATUS, RP0 | ;Bank1 |
| movlw | b'11111100' | ;Mengatur pin input dan output |
| movwf | TRISA | ;Menulis Register TRISA |
| bcf | STATUS, RP0 | ;Bank0 |
Contoh menunjukkan bagaimana pin 0, 1, 2, 3, dan 4 ditujukan sebagai input, dan pin 5, 6, dan 7 sebagai output.