Konstruksi dasar AT89Cx051
Meskipun termasuk tua, keluarga Mikrokontroler MCS51 adalah Mikrokontroler yang paling populer saat ini. Keluarga ini diawali oleh Intel yang mengenalkan IC Mikrokontroler type 8051 pada awal tahun 1980-an, 8051 termasuk sederhana dan harganya murah sehingga banyak digemari, banyak pabrik IC besar lain yang ikut memproduksnya, tentu saja masing-masing pabrik menambahkan kemampuan pada mikrokontroler buatannya meskipun semuanya masih dibuat berdasarkan 8051. Sampai kini sudah ada lebih 100 macam mikrokontroler turunan 8051, sehingga terbentuklah sebuah ‘keluarga besar mikrokontroler’ dan biasa disebut sebagai MCS51.
Belakangan ini, pabrik IC Atmel ikut menambah anggota keluarga MCS51. Atmel merupakan pabrik IC yang sangat menguasai teknologi pembuatan Flash PEROM, jadi sudah selayaknya kalau Atmel memasukkan Flash PEROM ke dalam mikrokontroler buatannya. Usaha Atmel ini ternyatakan bagaikan menambah ‘darah’ baru bagi keluarga MCS51, dengan adanya Flash PEROM yang harganya murah maka tercapailah angan-angan banyak orang untuk membuat alat berbasis mikrokontroler yang sesederhana mungkin dan semurah mungkin.
Produksi mikrokontroler MCS51 Atmel dibagi dua macam, yang berkaki 40 setara dengan 8051 yang asli, bedanya mikrokontroler Atmel berisikan Flash PEROM dengan kapasitas berlainan. AT89C51 mempunyai Flash PEROM dengan kapasitas 2 Kilo Byte, AT89C52 4 Kilo Byte, AT89C53 12 Kilo Byte, AT89C55 20 Kilo Byte dan AT89C8252 berisikan 8 Kilo Byte Flash PEROM dan 2 Kilo Byte EEPROM.
Yang berkaki 20 adalah MCS51 yang disederhanakan, penyederhanaan dilakukan dengan cara mengurangi jalur untuk input/output paralel, kemampuan yang lain sama sekali tidak mengalami pengurangan. Penederhanaan ini dimaksudkan untuk membentuk mikrokontroler yang bentuk fisiknya sekecil mungkin tapi mempunyai kemampuan sama. Atmel memproduksi 3 buah mikrokontroler ‘mini’ ini, masing-masing adalah AT89C1051 dengan kapasitas Flash PEROM 1 Kilo Byte, AT89C2051 2 Kilo Byte dan AT89C4051 4 Kilo Byte. Ketiga mikrokontroler ini secara umum disebut sebagai AT89Cx051.
klik pada gambar untuk ukuran sebenarnya
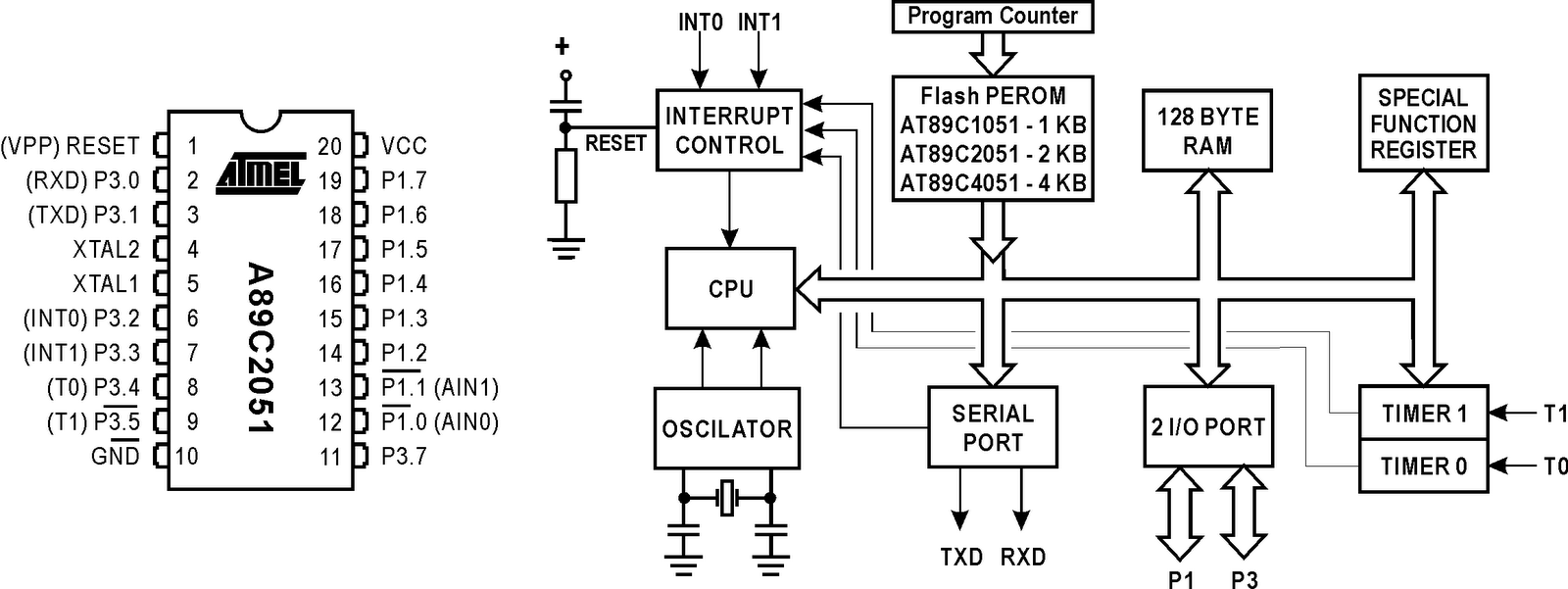
Gambar 1
Susunan kaki AT89Cx051 dan kontruksi dalam chip
Susunan kaki AT89Cx051 dan kontruksi dalam chip
Konstruksi AT89Cx051
Gambar 1 memperlihatkan susunan kaki AT89C2051, susunan kaki ini sama persis dengan AT89C1051 dan AT89C4051. Demikian pula ketiga IC mempunyai konstruksi di dalam chip yang sama persis, perbedaannya hanya terletak pada kapasitas Flash PEROM.
IC AT89Cx051 hanya memerlukan tambahan 3 kapasitor, 1 resistor dan 1 Xtal serta catu daya 5 Volt. Kapasitor 10 mikro-Farad dan resistor 10 Kilo Ohm dipakai untuk membentuk rangkaian reset, dengan adanya rangkaian reset ini AT89Cx051 otomatis di-reset begitu rangkaian menerima catu daya. Xtal dengan frekuensi maksimum 24 MHz dan 2 kapasitor 30 pico-Farad dipakai untuk melengkapi rangkaian oscilator pembentuk clock yang menentukan kecepatan kerja mikrokontroler.
Memori merupakan bagian yang sangat penting bagi mikrokontroler, diperlukan 2 macam memori yang sifatnya berbeda.
Read Only Memory (ROM) yang isinya tidak berubah meskipun IC kehilangan catu daya, dipakai untuk menyimpan program, begitu di-reset mikrokontroler akan langsung bekerja dengan program dalam ROM tersebut. Sesuai dengan keperluannya, dalam susunan MCS51 memori penyimpan program ini dinamakan sebagai MEMORI PROGRAM.
Random Access Memory (RAM) isinya akan sirna begitu IC kehilangan catu daya, dipakai untuk menyimpan data pada saat program bekerja. Di samping untuk data, RAM dipakai pula untuk Stack. RAM yang dipakai untuk menyimpan data ini disebut pula sebagai MEMORI DATA.
Ada berbagai jenis ROM. Untuk mikrokontroler dengan program yang sudah baku dan diproduksi secara massal, program diisikan ke dalam ROM pada saat IC mikrokontroler dicetak di pabrik IC. Untuk keperluan yang jumlahnya tidak banyak biasanya tidak dipakai ROM, tapi dipakai ROM yang bisa di-isi-ulang atau Programable-Eraseable ROM (disingkat menjadi PEROM atau PROM). Dulu banyak dipakai UV-EPROM (Ultra Violet Eraseable Programable ROM) yang kemudian dinilai mahal harganya dan ditinggalkan setelah ada Flash PEROM yang harganya jauh lebih murah.
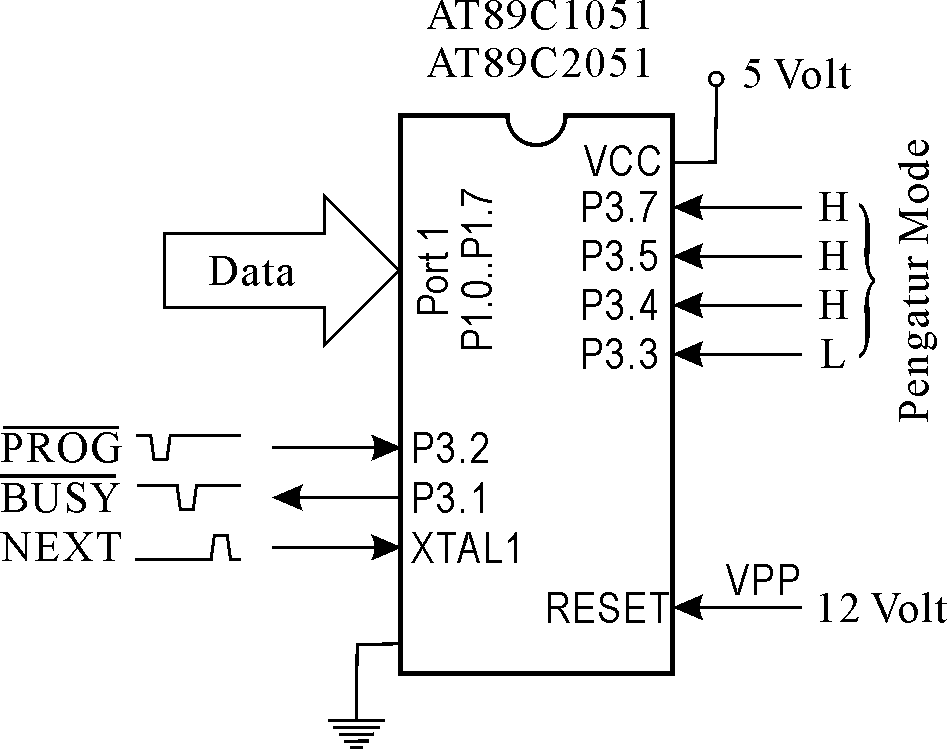
Jenis memori yang dipakai untuk Memori Program AT89Cx051 adalah Flash PEROM, program untuk mengendalikan mikrokontroler diisikan ke memori itu lewat bantuan alat yang dinamakan sebagai AT89Cx051 Flash PEROM Programmer.
Memori Data yang disediakan dalam chip AT89Cx051 sebesar 128 byte, meskipun hanya kecil saja tapi untuk banyak keperluan memori kapasitas itusudah mencukupi.
Sarana Input/Output yang disediakan cukup banyak dan bervariasi. AT89Cx051 mempunyai 17 jalur Input/Output paralel. Jalur Input/Output paralel ini dikenal sebagai Port 1 (P1.0..P1.7) dan Port 3 (P3.0..P3.5 dan P3.7).
AT89Cx051 dilengkapi UART (Universal Asynchronous Receiver/Transmiter) yang biasa dipakai untuk komunikasi data secara seri. Jalur untuk komunikasi data seri (RXD dan TXD) diletakan berhimpitan dengan P1.0 dan P1.1 di kaki nomor 2 dan 3, sehingga kalau sarana UART ini dipakai maka P1.0 dan P1.1 tidak lagi bisa dipakai untuk jalur input/output paralel.
Timer 0 dan Timer 1 masing-masing adalah untaian pencacah biner 16 bit (16 bit binary counter) di dalam chip yang dipakai sebagai sarana input/output yang bekerja menurut fungsi waktu. Clock penggerak untaian pencacah ini bisa berasal dari oscilator kristal atau clock yang diumpan dari luar lewat T0 dan T1. T0 dan T1 berhimpitan dengan P3.4 dan P3.5, sehingga P3.4 dan P3.5 tidak bisa dipakai untuk jalur input/output paralel kalau T0 dan T1 dipakai.
AT89Cx051 mempunyai 5 sumber pembangkit interupsi, 2 diantaranya adalah sinyal interupsi yang diumpankan ke kaki INT0 dan INT1, kedua kaki ini berhimpitan dengan P3.2 dan P3.3 sehingga tidak bisa dipakai sebagai jalur input/output paralel kalau INT0 dan INT1 dipakai untuk menerima sinyal interupsi.
3 sumber interupsi yang lain berasal dan sarana komunikasi data seri dan dari sistem Timer 0 dan Timer 1.
Port 1, Port 2, UART, Timer 0, Timer 1 dan sarana lainnya merupakan register yang secara fisik merupakan RAM khusus, yang ditempatkan di Special Function Register (SFR).
Dasar kerja program
Program untuk mengendalikan kerja dari mikrokontroler disimpan di dalam memori program. Program pengendali tersebut merupakan kumpulan dari instruksi kerja mikrokontroler, 1 instruksi MCS51 merupakan kode yang panjangnya bisa satu sampai empat byte.
Sepanjang mikrokontroler bekerja, instruksi tersebut byte demi byte diambil ke CPU dan selanjutnya dipakai untuk mengatur kerja mikrokontroler. Proses pengambilan instruksi dari memori program dikatakan sebagai ‘fetch cycles’ dan saat-saat CPU melaksanakan instruksi disebuat sebagai ‘execute cycles’.
Semua mikrokontroler maupun mikroprosesor dilengkapi sebuah register yang berfungsi khsus untuk mengatur ‘fetch cycles’, register tersebut dinamakan sebagai Program Counter. Nilai Program Counter secara otomatis bertambah satu setiap kali selesai mengambil 1 byte isi memori program, dengan demikian isi memori program bisa berurutan diumpankan ke CPU.
Saat MCS51 di-reset, isi Program Counter di-reset menjadi 0000. Artinya sesaat setelah reset isi dari memori program nomor 0 dan seterusnya akan diambil ke CPU dan diperlakukan sebagai instruksi yang akan mengatur kerja mikrokontroler. Dengan demikian, awal dari program pengendali MCS51 harus ditempatkan di memori nomor 0, setelah reset MCS51 menjalankan program mulai dari memori-program nomor 0000, dengan melakukan proses ‘fetch cycles’ dan ‘execute cycles’ terus menerus tanpa henti.
Jika sarana interupsi diaktipkan, dan tegangan di kaki INT0 (kaki nomor 6) merubah dari ‘1’ menjadi ‘0’, maka proses menjalankan program di atas akan dihentikan sebentar, mikrokontroler melayani dulu permintaan interupsi, selesai melayani permintaan interupsi CPU akan melanjutkan mengerjakan program utama lagi.
Untuk melaksanakan hal tersebut, pertama-tama CPU menyimpan nilai Program Counter ke Stack (Stack merupakan satu bagian kecil dari data memori – RAM), kemudian mengganti isi Program Counter dengan 0003. Artinya MCS51 akan melaksanakan program yang ditempatkan di memori program mulai byte ke 3 untuk melayani interupsi yang diterima dari kaki INT0. Adalah tugas programer untuk mengatur agar program yang dipakai untuk melayani interupsi lewat INT0 diletakkan disitu.
Selesai melayani interupsi, nilai Program Counter yang tadi disimpan ke dalam Stack akan dikembalikan ke Program Counter, dengan demikian CPU bisa melanjutkan pekerjaan di program Utama.
Selain INT0, AT89Cx051 bisa menerima interupsi dari INT1, dari UART dan dari Timer. Agar permintaan interupsi itu bisa dilayani dengan program yang berlainan, maka masing-masing sumber interupsi itu mempunyai nomor awal program untuk layanan interupsi yang berlainan. Nomor-nomor awal tersebut digambarkan dalam Gambar 2.

Gambar 2
Peta Memori Program
Peta Memori Program